图像滤波 ImageFilter
信号与系统 Signals and Systems
脉冲信号 impulse signals
默认定义域是整数 $\mathbb{Z}$.
📝定义 1
$\delta_k[n]=\begin{cases}
1, & n=k \\
0, & n\neq k
\end{cases}$
默认 $\delta[n]$ 为 $\delta_0[n]$.
注意符号的表示 $\delta[n-n_0]=\delta_{n_0}$. 并且 $\delta[n-n_0]$ 既可以表示为一个信号, 也可以理解为 $\delta$ 在 $n-n_0$ 处的取值.
🧾性质 2
impulse signal 与任一信号
$g$ 的卷积还是
$g$ (单位元), 即
$$
f[n]=(\delta \circ g)[n]=\sum\limits_{k}\delta[n-k]g[k]=g[n]
$$
上式既可以理解为是信号的运算, 也可以理解为是在 $n$ 处的取值, 即其中的求和可以是若干脉冲信号的叠加.
通过与 $\delta_n$ 做内积运算, 可以得到一个信号的第 $n$ 项, $g[n]=\langle \delta_n,g\rangle$.
🧾性质 3
impulse signal 可用于平移信号, 与
$\delta_{n_0}$ 卷积可得
$f[n-n_0]$, 即
$$
f[n-n_0]=(\delta_{n_0}\circ f)[n]=\sum\limits_{k}\delta[n-n_0-k]f[k]=\langle\delta_{n-n_0},f\rangle
$$
如果理解为在 $n-n_0$ 处的值, 那么等式均成立, 如果理解为信号, 那么最后一个内积等式忽略.
📝定义 4
LTI system (Linear time-invariant system) 线性时不变系统. 同时满足线性性和时间不变性的系统.
🧾性质 5
如果有一个 LTI system T,
$\delta$ 信号经过这个系统 T 后变为信号
$h$, 那么就可以得到任意信号
$f$ 经过该系统后的结果
$g=h\circ f$.
$$
\begin{aligned}
T(f)&=T(\sum\limits_{k}f[k]\delta[n-k]) & (\text{此处理解为脉冲信号的叠加}) \\
&=\sum\limits_{k}f[k]T(\delta[n-k]) & (\text{T 的线性性}) \\
&=\sum\limits_{k}f[k]h[n-k] & (f[k]\text{ 是值 }\ h[n-k]\text{ 是信号}) \\
&= f\circ h = h\circ f.
\end{aligned}
$$
ℹ️注 6
$T(f)[n]\neq T(f[n])$ 即系统 T 是对整个信号变化, 而不是对信号中某一点的取值变化.
$\delta$-Function
📝定义 7 $\delta$-Function
连续意义下的脉冲信号 $\delta(x-x_0)$, 要求在 $(-\infty,\infty)$ 上积分为 $1$, 在 $x\neq x_0$ 处为 $0$.
严格定义违反数学常识, 可理解为在 $x_0$ 处无限高, 无限窄但面积始终为 $1$, 用于提取连续信号在 $x_0$ 处的值.
🧾性质 8
对任意足够光滑的函数
$f(x)$, 有
$$
\int_{-\infty}^\infty f(x)\delta(x-x_0)\text{d} x = f(x_0)
$$
所以也称该函数为取样算子.
🧪例 9
由于
$\delta$ 函数无法直接表示, 一般表示为函数族的极限, 例如下列情形.
$$
Gauss: \delta(x)=\lim\limits_{\alpha\to 0}\frac{1}{\sqrt{\pi}\alpha}e^{-x^2/2\alpha^2}
$$
$$
sinc: \delta(x)=\lim\limits_{\alpha\to\infty}\frac{\sin(\alpha x)}{\pi x}
$$
$$
Fourier: \delta(x)=\frac{1}{2\pi}\int_{-\infty}^{+\infty}e^{\text{i} w x}\text{d} x
$$
图像与图像处理 Image and Image Processing
存储方式: 以矩阵的形式存储.
- 灰度: 0-255, 0 黑 255 白
- RGB [R,G,B]: 每一维 0-255
- Lab [L,a,b]: 亮度, a (从绿色到红色分量), b (从蓝色到黄色分量).
- HSV [H,S,V]: 色调, 饱和度, 明度.
📝定义 10
图片可以理解为一个函数 $f:\mathbb{R}^2\to \mathbb{R} or \mathbb{R}^M$
例如灰度就是 $f:[a,b]\times [c,d]\to[0,255]$.
🧪例 11
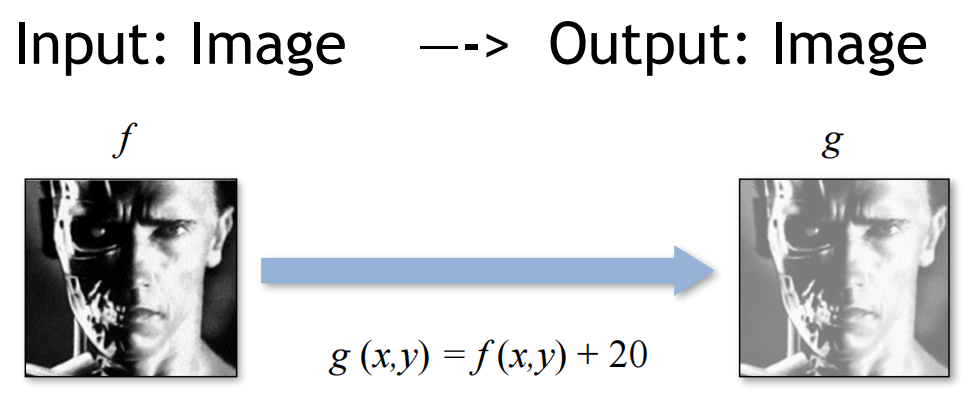
效果: 灰度值 +20, 使整体变亮
点算子
$g(x,y)=h(f(x,y))$.
🧪例 12
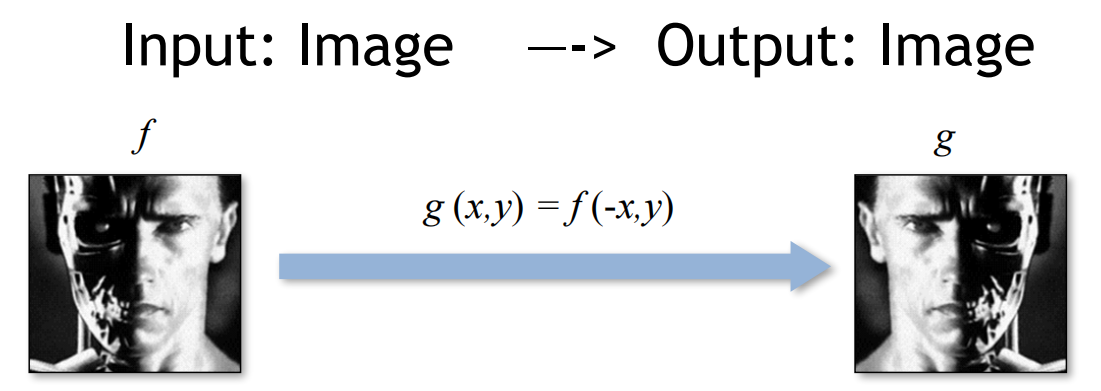
效果: x 变为 -x, 左右翻转.
点算子
$g(x,y)=f(T(x,y))$.
均值滤波与滤波 Mean Flitering and Filter
📝定义 13 滤波
通过将原图像中的像素以某种组合方式形成新图像的过程.
目的:
- 提取图像中的有效信息. (提取边缘, 提取轮廓等)
- 增强图像. (去噪, 锐化等)
📝定义 14 均值滤波
思想: 用四周的像素点平均值来消除噪音. 基于相近的像素颜色一般也相近.
过程: 选取均值范围大小, 计算新的颜色值.
问题: 在消除部分噪音的同时也模糊了细节.
🧪例 15
以大小为
$3\times 3$ 的范围为例, 均值滤波的算子定义为
$$
S(f)[n,m]=\frac 1 9\sum\limits_{i=-1}^1\sum\limits_{j=-1}^1 f(n+i,m+j)
$$
🧪例 16
假设噪声分布属于 Gauss 分布 $\varepsilon(n,m)\sim N(0,\sigma^2)$.
卷积与互相关 Convolution and Cross-correlation## 线性与位移不变性 Linearity and Shift invariance## 非线性滤波 Non-linear filters
有些时候平均滤波效果不好, 会模糊细节. 所以需要一些非线性滤波.
📝定义 17 中位数滤波
用周围点的中位数替代原像素.
原理: 离群点数量少.
🧾性质 18
- 不引入新的像素值.
- 对脉冲信号, salt \& pepper 噪点效果好.
如何选取滤波方式 How to decide a filter
需要决定两件事:
- $N_p$ 原像素位置 $p$ 有哪些邻居会影响 $p$ 新的像素值.
- 每个像素的影响权重 $w(p,q)$.
当像素位置不变时, 即变换后的新像素值仍处于原位置.
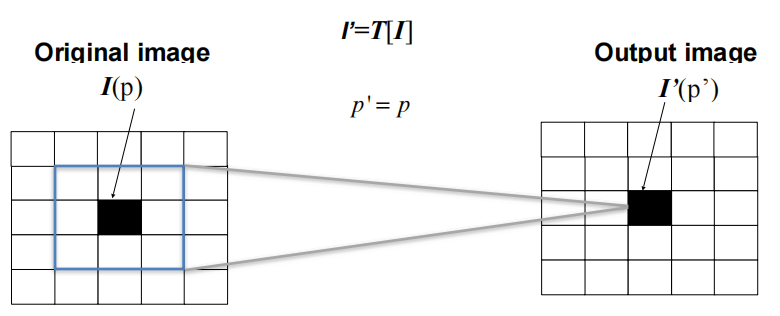
$$
I'(p')=T\{(I_q,q)|q\in N_p\}=\sum\limits_{q\in N_p}w(p,q)I(q)=w*I(p)
$$
🧪例 19
- 均值滤波:
$$
w(p,q)=\frac{1}{|N_p|}
$$
- 高斯滤波:
$$
w(p,q)=\frac 1 S\exp\left(-\frac{\Vert p-q\Vert^2}{2\sigma^2}\right),\quad S=\sum\limits_{r\in N_p}\left(-\frac{\Vert p-r\Vert^2}{2\sigma^2}\right)
$$
- 中位数滤波:
$$
w(p,q)=\begin{cases}
1, & I(q)=\text{median}(I(r))\\
0, & \text{otherwise}
\end{cases}
$$
卷积的性质 Properties of Convolution
📝定义 20
- 交叉相关 (cross correlation)
$$
\begin{aligned}
S[f]=w\otimes f\\
S[f](m,n)=\sum\limits_{i=-k}^k\sum\limits_{j=-k}^k w(i,j)f(m+i,n+j)
\end{aligned}
$$
- 卷积 (convolution)
$$
\begin{aligned}
S[f]=w*f\\
S[f](m,n)=\sum\limits_{i=-k}^k\sum\limits_{j=-k}^k w(i,j)f(m-i,n-j)
\end{aligned}
$$
🧾性质 21
相关核
$g(x,y)$, 与卷积核
$g'(x,y)$ 满足中心对称关系 (二维情形), 即
$$
g(x,y)=g'(-x,-y)
$$
🧾性质 22 线性性
$$
(w\otimes f)(m,n)=\sum\limits_{i=-k}^k\sum\limits_{j=-k}^k w(i,j)f(m+i,n+j)
$$
$$
w'=aw+bv
$$
$$
w'\otimes f=a(w\otimes f)+b(v\otimes f)
$$
🧾性质 23 平移不变性
相关/卷积可以和平移算子交换.
$$
f'(m,n)=f(m-m_0,n-n_0)
$$
$$
(w\otimes f)(m,n)=(w\otimes f)(m-m_0,n-n_0)
$$
🧾性质 24 可交换性
卷积可交换, 但相关不行.
$$
(w*f)(m,n)=(f*w)(m,n)
$$
🧾性质 25 卷积结合性
💡命题 26
任意线性平移不变的算子都可以表示为卷积.
🧾性质 27
卷积不受输入大小影响.
- 平移不变性 $f(\text{translate}(x))=\text{translate}(f(x))$.
- 关注局部细节, 多层 CNN 可以获取更大的范围特征.
- 图像滤波, 模板匹配
- 参数共享, 不同位置的卷积核一致. 参数量少.
- 适用于任意输入图像.
边界处理:
- 全卷积, 只要卷积核与原图像有重合就计算.
会使得图像变大, 输出大小为 $m+k-1$.
- 同大小卷积, 只计算中心位置在图像中的卷积.
输出大小不变.
- 有效卷积, 只计算整个卷积核在图像中的.
输出大小变小 $m-k+1$.
高斯滤波 Gaussian Filter
Difference of Gaussians -Dog
可分离滤波器 Separable Filters
卷积复杂度:
Image: $w\times h$.
Filter: $k\times k$.
每次卷积 $O(k^2)$.
总复杂度 $O(whk^2)$.
📝定义 28
称一个卷积核是可分离的当且仅当存在等式
$$
w(i,j)=u(i)v(j)
$$
从而两个方向分别做卷积.
复杂度优化至 $O(whk)$.
双边滤波 Bilateral Filter
📝定义 29
综合考虑位置远近和灰度值差距.
$$
BF[I]_p\quad=\quad\frac {1}{W_p}\sum\limits_{q\in S}G_{\sigma_s}(\Vert p-q \Vert)G_{\sigma_r}(|I_[-I_q]|)I_q\quad
$$
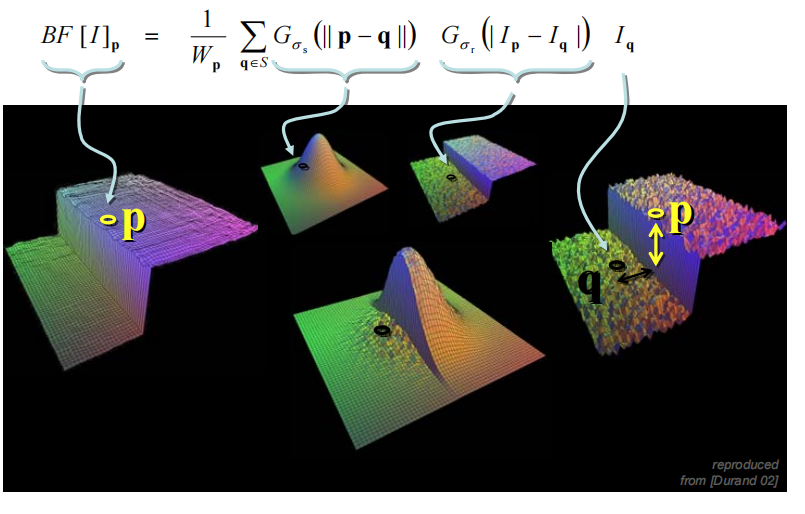
缺点: 速度慢.
微分方程和图像处理 Diffusion Equation \& Image